Crack Detection and Characterization on Building Elements (2023-Present)
We studied the application of deep learning and image segmentation techniques for crack detection in civil infrastructure. We investigated the effectiveness of some deep learning models, such as Inception, ResNet, MobileNet, VGG, and U-Net, in detecting cracks on civil infrastructure surfaces.
Support
![]()
Hypothyroidism prediction based on Explainable AI (2022-2024)

The application of Artificial Intelligence (AI) in medical diagnosis has shown promising results. However, the lack of transparency in AI models poses challenges in comprehending and trusting their decisions, impeding their widespread clinical adoption.
In this project, we developed a diagnostic support system for hypothyroidism prediction based on Explainable AI. We used feature selection techniques to identify the most relevant features for the prediction of hypothyroidism. We also used explainable AI techniques to provide insights into the model's decision-making process.
Support
![]()
Publications
CAVALCANTE, C. M. V. ; REGO, ROSANA C. B. "Early prediction of hypothyroidism based on feature selection and explainable artificial intelligence." In: Simpósio Brasileiro de Computação Aplicada à Saúde (SBCAS), 2024, Goiânia. Anais do XXIV Simpósio Brasileiro de Computação Aplicada à Saúde, 2024. p. 49-60.
CAVALCANTE, CAIO ; ALMEIDA, VINICIUS ; BARROS, MARCOS ; LIMA, NATHALEE ; REGO, ROSANA. "Thyroid Syndrome Detection using Machine Learning Algorithms: A Comparative Analysis." In: Congresso Brasileiro de Inteligência Computacional, 2024. Anais do XVI Congresso Brasileiro de Inteligência Computacional.
REGO, R. C. B.; ALMEIDA, V. A. ; CAVALCANTE, C. M. V. ; LIMA, N. C. A. "Diagnostic Support System for Euthyroid Sick Syndrome based on Machine Learning Algorithms Approaches." In: International Conference on Intelligent Systems and New Applications, 2023, Liverpool. ICISNA 23 Proceedings Book. Liverpool, 2023. v. 1. p. 259-264.
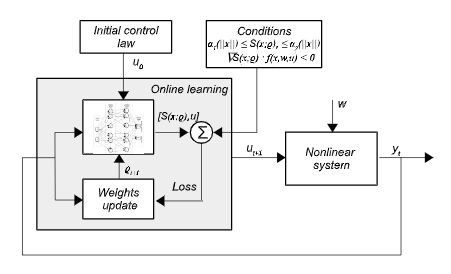
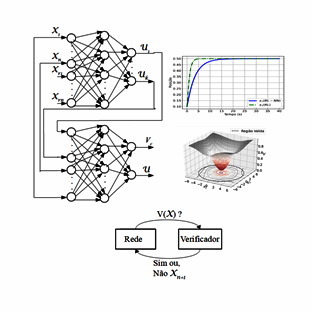
Lyapunov-based Intelligent Control (2020-2022)
Control of nonlinear systems plays a crucial role in many practical systems. Most of the real systems are nonlinear, then performs control of nonlinear systems are such important.
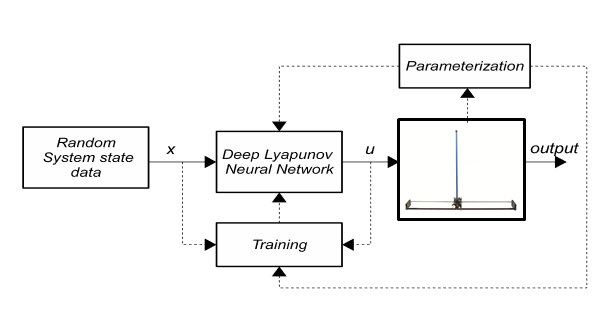
Motivated by this, we developed a learning-based control that uses the capability of the machine learning algorithm to perform control for nonlinear or complex systems.
The following two videos display the inverted pendulum without control and controlled, and the second video demonstrates the ball beam system controlled.
To study and develop the control method, we used rotary inverted pendulum nonlinear system. Why? Because the inverted pendulum represents many real-world systems such as the segway, the human posture systems, the launching of a rocket, and so on.
Tools


Support
![]()
![]()
![]()
Publications
Rego, Rosana CB, and Fábio MU de Araújo. "Learning‐based robust neuro‐control: A method to compute control Lyapunov functions." International Journal of Robust and Nonlinear Control (2021).
Rego, Rosana Cibely Batista, and Fábio Meneghetti Ugulino de Araújo. "Nonlinear Control System with Reinforcement Learning and Neural Networks Based Lyapunov Functions." IEEE Latin America Transactions 19.8 (2021): 1253-1260.